Imatger fora de línia semiautomàtic

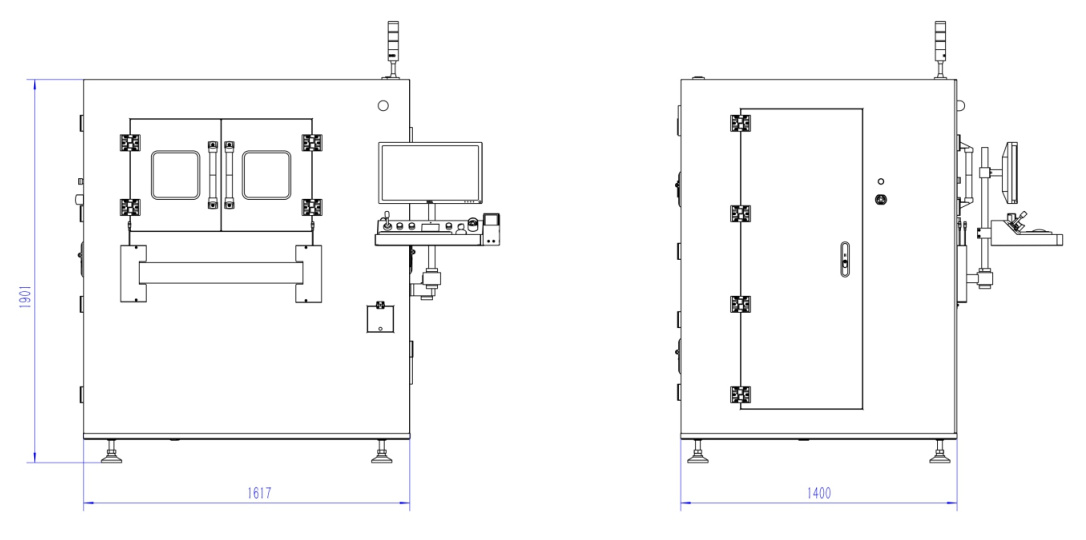
Dibuix de dimensions de l'equip
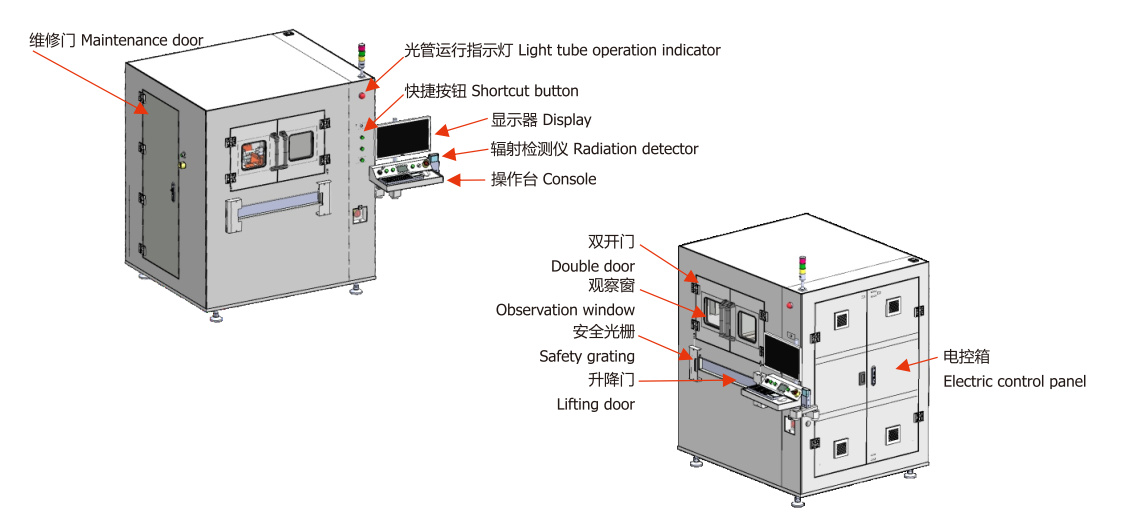
Característiques de l'equip
Funció de detecció automàtica de voladís: els algoritmes d'imatge del programari poden detectar un gruix màxim de 48 capes de cèl·lules:
Funció de millora d'imatges en temps real:
Funció de navegació de vídeo:
Funció de calibratge del detector de panell de greix: Pot aconseguir una calibració de camp fosc i clar per al detector de panell pla:
Funció de desar imatges per als resultats de les proves:
Funció de sortida de missatges ràpids: funció de calibratge, funció de calibratge de navegació;
Efecte d'imatge
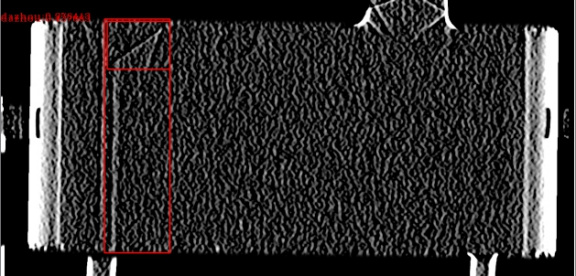
Detecció d'arrugues
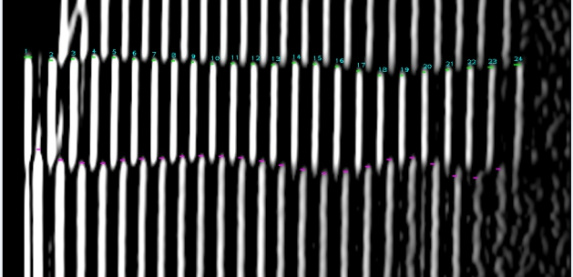
Detecció de voladís
| Nom | Índexs |
| Mida del cos | L=1400 mm A=1620 mm A=1900 mm |
| Pes | 2500 kg |
| Poder | 5 kW |
| Àrea de detecció | 600 mm x 600 mm |
| Tipus de tub de raigs X | Tub tancat |
| Potència del tub de raigs X | 75 W (150 KV, 500 µA) |
| Detector de pantalla plana | Àrea efectiva del detector: 250 x 300 mm Matriu d'imatge: 2500 x 3000 mm |
| Recorregut de l'eix Z del detector | 500 mm |
| Ampliació | 1,5~12,5x (augment del sistema 1000x) |
| Nombre de capes efectives detectades | ≤48 capes |
| Fuita de raigs X | ≤1.0μSv/h |
| IPC | CPU de doble nucli, memòria de 4 GB, disc dur de 500 GB, configuració equivalent o superior |
| Pantalla | 21,5 polzades, configuració equivalent o superior |
| UPS | Fluctuació de voltatge ≤±2% |
| Temperatura ambient | <50 °C |
| Humitat ambiental | <85%, sense condensació |
| Font d'alimentació | 220V/50Hz |
| Mode d'alimentació | Càrrega i descàrrega manuals |
Escriu el teu missatge aquí i envia'ns-el










